
iWMC集成式伺服轮
- ⾼度集成化:驱动器、电机、减速机、轮⼦四⼤主要部件⾼度集成化,结构紧凑,有利于⻋体⼩型化;
- 安装精度⾼:⽀架式安装,安装⽅式简单,⽅便,安装精度⾼,提⾼⾏⾛控制精度;
- 可靠性⾼:集成化模组,外部只有电源与通信线缆,抗⼲扰性好,提⾼整⻋系统稳定性、可靠性;
- 兼容设计,⽆缝切换:伺服轮产品通讯模式、使⽤⽅式与步科标准品⽆差异,⽆缝切换;
- 维护性好:集成化产品单⼀供应商,有利于后期产品维护,降低供应链、售后成本
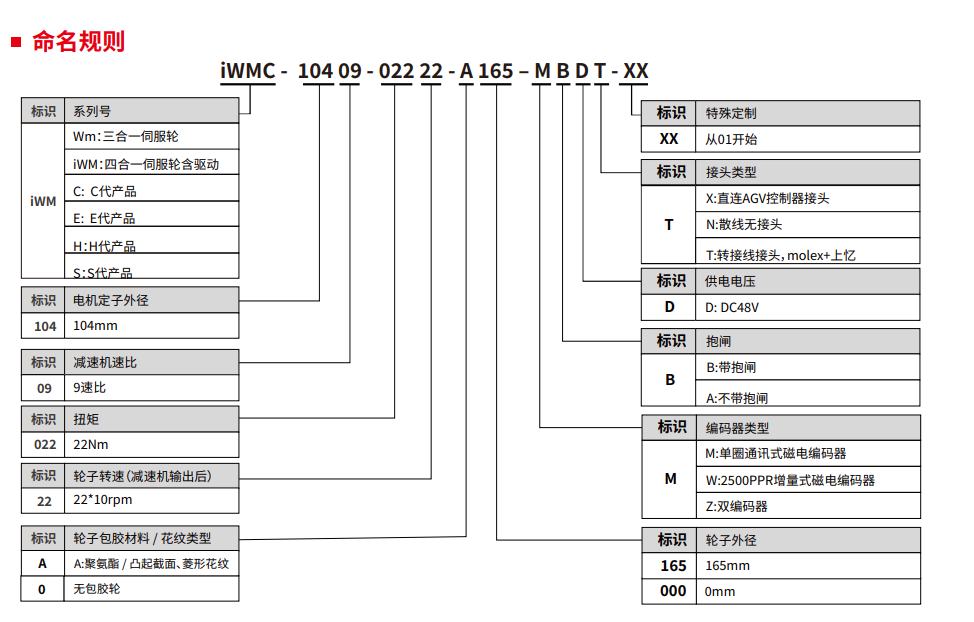
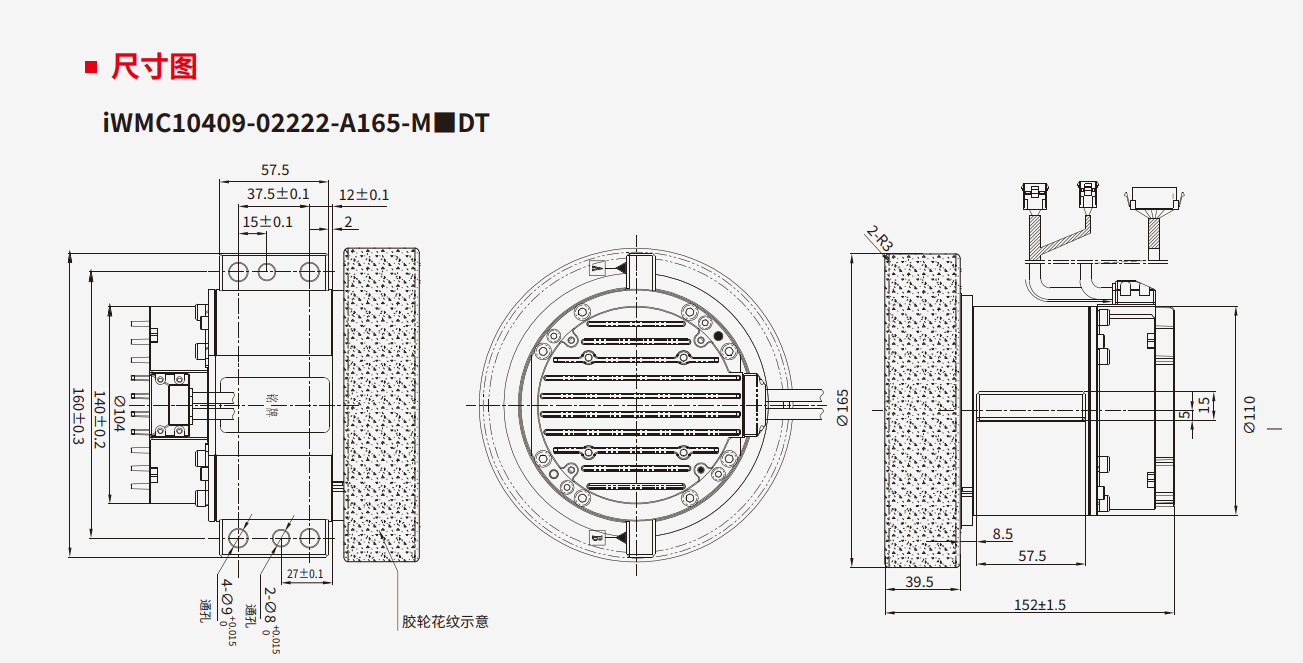
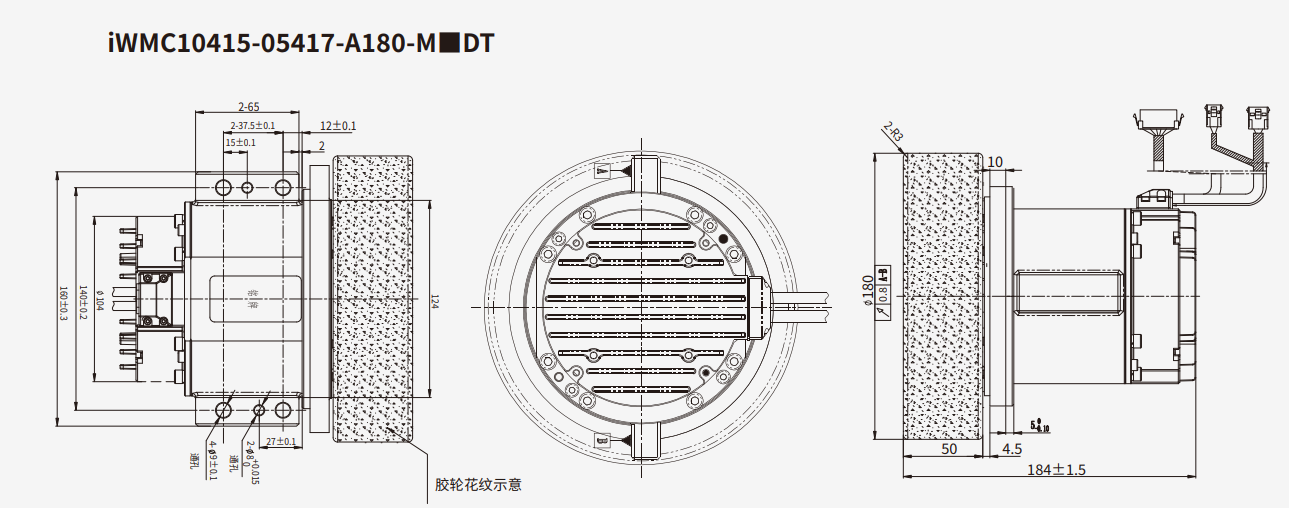
| iWMC集成式伺服轮型号 | iWMC10409-02222-A165-M■DT | iWMC10411-04023-A180-M■DT | |
| 电源 | 动力电源 | 24VDC-60VDC | |
| 逻辑电源 | 24VDC | ||
| 额定线速度(m/s) | 1.9 | 2.14 | |
| 额定转矩Tn(Nm) | 21 | 40 | |
| 峰值转矩Tn(Nm) | 60 | 99 | |
| 轮胎直径(mm) | 165 | 180 | |
| 轮胎宽度(mm) | 39.5 | 50 | |
| 轮胎材质 | 聚氨酯(可选) | ||
| 轮胎硬度等级 | 85 A | 90 A | |
| 能耗制动 | 需要外接制动电阻(根据运行情况而定,主要应用在急速起停的场合) | ||
| 能耗制动电压吸收点 | DC63V±2V(默认值,可设置) | ||
| 过压预警电压 | DC68V±2V | ||
| 欠压预警电压 | DC18V±2V | ||
| 输入规格 | 2路数字量输入,共COMI端,高电平:12.5-30VDC,低电平:0-5VDC,上限频牢:1KHz。输入阻抗:5KΩ. | ||
| 输出规格 | 1路数字量输出共COMO端|上限输出电流:100mA | ||
| 抱闸 | 内置抱闸及控制电路 | ||
| 强制解抱闸接口 | 1路强制解抱闸接口,限伺服轮无电源输入时使用。 | ||
| RS485调试口 | 上限支特115.2Kbps波特率 | ||
| CAN BUS | 上限支持1Mbps波特率,可使用CANopen协议与处理器通讯 | ||
| 驱动器电流 | 连续输出电流上限(rms) | 16A | 26A |
| 峰值电流(PEAK) | 100AP(<2s) | 100AP(<2s) | |
| 电机 | 额定转速nN(rpm) | 2000 | 2500 |
| 额定转矩Tn(Nm) | 2.4 | 4 | |
| 抱闸保持扭矩T(Nm) | 4 | ||
| 噪音 | <65dB | ||
| 冷却方式 | 自然冷却,车体辅助散热 | ||
| 使用 环境 |
工作温度 | 0~40℃ | |
| 保存温度 | -20~60℃ | ||
| 湿度(不结露) | 90%RH以下 | ||
| 防护等级 | IP54 | ||
| 高度 | 额定工作海拨1000m以下,工作海拔在1000米以上时,每上升100米。需降额1.5%使用,上限工作高度海拨2000米。 | ||
| 大气压力 | 86kpa~106kpa | ||
| 注:■=A:不带抱闸 B:带抱闸 |
|||
600公⽄以下,和1吨以下负载移动机器⼈⾏⾛专⽤动⼒伺服轮模组。
⾼度集成化:驱动器、电机、减速机、轮⼦四⼤主要部件⾼度集成化,结构紧凑,有利于⻋体⼩型化; 安装精度⾼:⽀架式安装,安装⽅式简单,⽅便,安装精度⾼,提⾼⾏⾛控制精度; 可靠性⾼:集成化模组,外部只有电源与通信线缆,抗⼲扰性好,提⾼整⻋系统稳定性、可靠性; 兼容设计,⽆缝切换:伺服轮产品通讯模式、使⽤⽅式与步科标准品⽆差异,⽆缝切换; 维护性好:集成化产品单⼀供应商,有利于后期产品维护,降低供应链、售后成本
